
Эксперимент 35. Конечные автоматы
Коне́чный автома́т — абстрактный автомат, число возможных внутренних состояний которого конечно. Если говорить проще, то с помощью конечного автомата описываются состояния какого либо объекта и переходы между этими состояниями. Например, светофор можно описать с помощью конечного автомата.
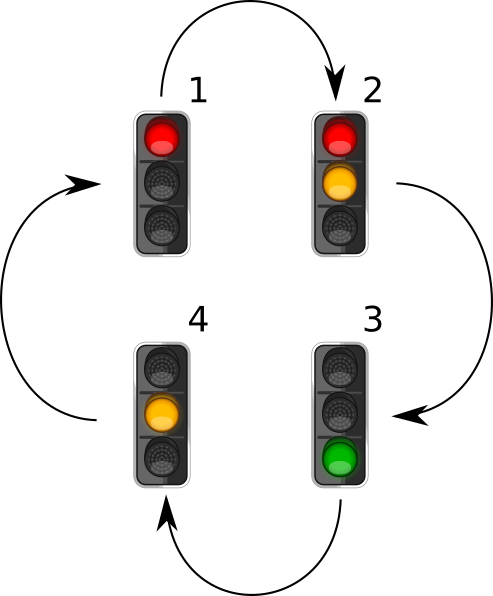
Видно, что из состояния 1 (красного сигнала) светофор может перейти только в состояние 2 (красный + желтый), означающий скорое включение зеленого. Из состояния 2 светофор может перейти только в состояние 3 (зеленый сигнал). После зеленого всегда идет желтый сигнал (состояние 4), который сменяется красным (состояние 1). Главное, что у данного конечного автомата есть 4 состояния и мы знаем из какого состояния в какое он может переходить.
Конечные автоматы иногда очень полезны для описания состояний электроники. Возьмем тот же инкрементальный энкодер. Снова посмотрим на график сигналов от него:
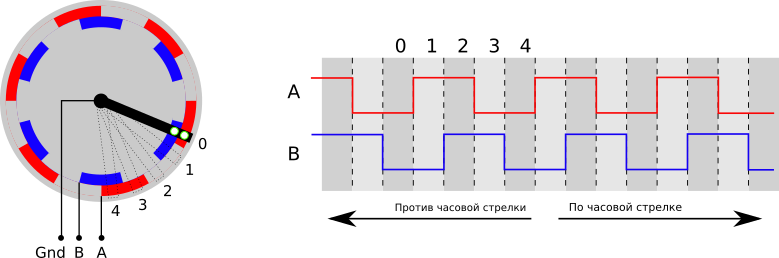
По графику видно, что состояния у энкодера не меняются хаотично. Они меняются только последовательно. Если крутить ручку в одну сторону, то состояния сменяются 0-1-2-3-0…, а если в другую, то 0-3-2-1-0…
Зная это мы можем отфильтровывать ложные показания из-за дребезга контактов и точно отслеживать импульсы. Попробуем обрабатывать сигналы энкодера с помощью конечного автомата.
Схема эксперимента
 Рисунок 1. Электрическая принципиальная схема эксперимента
Рисунок 1. Электрическая принципиальная схема эксперимента
 Рисунок 2. Монтажная схема эксперимента
Рисунок 2. Монтажная схема эксперимента
Программный код эксперимента
- Exp35.ino
- #include <LCDI2C_Multilingual.h>
- #define ENC_A 13
- #define ENC_B 12
- #define DEFAULT_I2C_ADDR 0x3F // Или 0x27 в зависимости от твоей платы IoT
- LCDI2C_Generic lcd(DEFAULT_I2C_ADDR, 16, 2);
- bool states[4][2] = {
- {0,0},
- {1,0},
- {1,1},
- {0,1}
- };
- bool value_a = 0;
- bool value_b = 0;
- int count = 0;
- int state = 0;
- int state_old = 0;
- void printLcd(int number) {
- lcd.clear();
- lcd.print(number);
- }
- int index(bool a, bool b){
- for (int i = 0; i < 4; i++){
- if (states[i][0] == a and states[i][1] == b) {
- return i;
- }
- }
- return -1;
- }
- void setup() {
- lcd.init();
- lcd.setBacklight(0);
- }
- void loop() {
- state = index(value_a, value_b);
- if ((state - state_old == 1) or (state == 0 and state_old == 3)) {
- count++;
- printLcd(count);
- state_old = state;
- }
- else if ((state - state_old == -1) or (state == 3 and state_old == 0)) {
- count--;
- printLcd(count);
- state_old = state;
- }
- }
Описываем возможные состояния конечного автомата:
Двумерный массив 4×2. Первая цифра это состояние сигнала A, вторая — сигнала B. Номер состояния — это индекс элемента списка. Логика переключения состояний автомата простая — состояние может смениться только на соседнее: состояние 0 на 1, 1 на 2, 2 на 3, 3 на 0. И в обратном направлении. Состояние не может измениться «перескочив» через другое. Эту логику мы опишем в программе далее.
В переменной state_old будем хранить последнее состояние конечного автомата, чтобы понимать какое состояние было и какое у него теперь будет.
В основном цикле программы мы получаем данные о текущем состоянии линий А и B:
И определяем номер состояния конечного автомата, соответствующего такому состоянию А и B с помощью написанной нами функцией index():
Функция index(a, b) принимает два параметра типа bool, осуществляет поиск соответствующего элемента в массиве states и возвращает индекс найденного элемента. Ключевое слово return прерывает работу функции и возвращает указанное после него значение.
Зачем же нужна строка return -1; в конце функции, если в цикле for в любом случае будет найден и возвращен индекс? Компилятор не на столько умный и не знает об этом, но для всех функций обязательно возвращение значения, иначе программа не скомпилируется. Поэтому мы возвращаем заведомо нереальное значение, т.к. в нашем случае строка return -1; никогда не будет выполнена.
Теперь мы знаем индекс только что измеренного состояния линий. А индекс последнего состояния конечного автомата хранится в переменной state_old. Теперь нам нужно понять можем ли мы из состояния записанного в state_old переключиться в новое состояние, индекс которого мы определили и записали в state.
Если индекс нового состояния на 1 больше старого или, если новое состояние 0, а старое 3, то регистрируем переход в новое состояние. Переводим конечный автомат в новое состояние state_old = state. Увеличиваем на 1 счетчик count, печатаем + в терминал и отображаем счетчик на дисплее.
Аналогично для вращения в обратную сторону. Если индекс состояния уменьшился на один, то производим аналогичные действия.
Когда ты запустишь эту программу в конструкторе, то увидишь, что значение на дисплее всегда меняется сразу на 2 и в терминале появляется по два + или -. Дело в том, что наш энкодер имеет фиксацию положений (при вращении ощущаются толчки). И эта фиксация осуществляется не в каждом состоянии, а через один. Таким образом от щелчка до щелчка энкодер проходит 2 состояния. Поэтому и число изменяется на 2.