
Эксперимент 14. Измерение напряжения
В предыдущей статье мы узнали о том что такое аналого- цифровой преобразователь. Микроконтроллер, на базе которого работает наш электронный конструктор, имеет встроенный аналого- цифровой преобразователь. Попробуем им воспользоваться.
Подключение переменного резистора
На плате конструктора установлен переменный резистор. Переменный резистор состоит из полукруглой пластины, покрытой веществом, имеющим электрическое сопротивление, и скользящего контакта с ручкой. У переменного резистора три вывода — по концам пластины и скользящий контакт. Сопротивление меняется в зависимости от длины отрезка резистивной пластины от ее начала до скользящего контакта. Чем больше этот путь, тем выше сопротивление.
 Рисунок 1. Переменный резистор. Внешний вид, устройство и условное обозначение
Рисунок 1. Переменный резистор. Внешний вид, устройство и условное обозначение
Переменный резистор можно представить как схему из двух резисторов

Делитель напряжения
С помощью переменного резистора будем получать аналоговый сигнал. Используем широко распространенную схему резисторного делителя напряжения. Резисторный делитель — это два последовательных участка цепи, называемых плечами, сумма напряжений на которых равна напряжению питания. Плечо между минусом питания и средней точкой называют нижним, а другое — верхним.

Резисторный делитель используется для деления напряжения. Например, если верхнее и нижнее плечи имеют одинаковые сопротивления, то напряжение на средней точке делителя равно половине напряжения питания. Такой делитель делит напряжение на 2.
Подключим нижнее плечо с земле, а верхнее к напряжению питания. Тогда при вращении ручки переменного резистора на его средней точки напряжение будет изменяться от 0 до напряжения питания (3,3в в нашем конструкторе). Подключим среднюю точку ко входу аналого- цифрового преобразователя и будем измерять напряжение на ней.
Схема эксперимента
 Рисунок 2. Электрическая принципиальная схема эксперимента
Рисунок 2. Электрическая принципиальная схема эксперимента
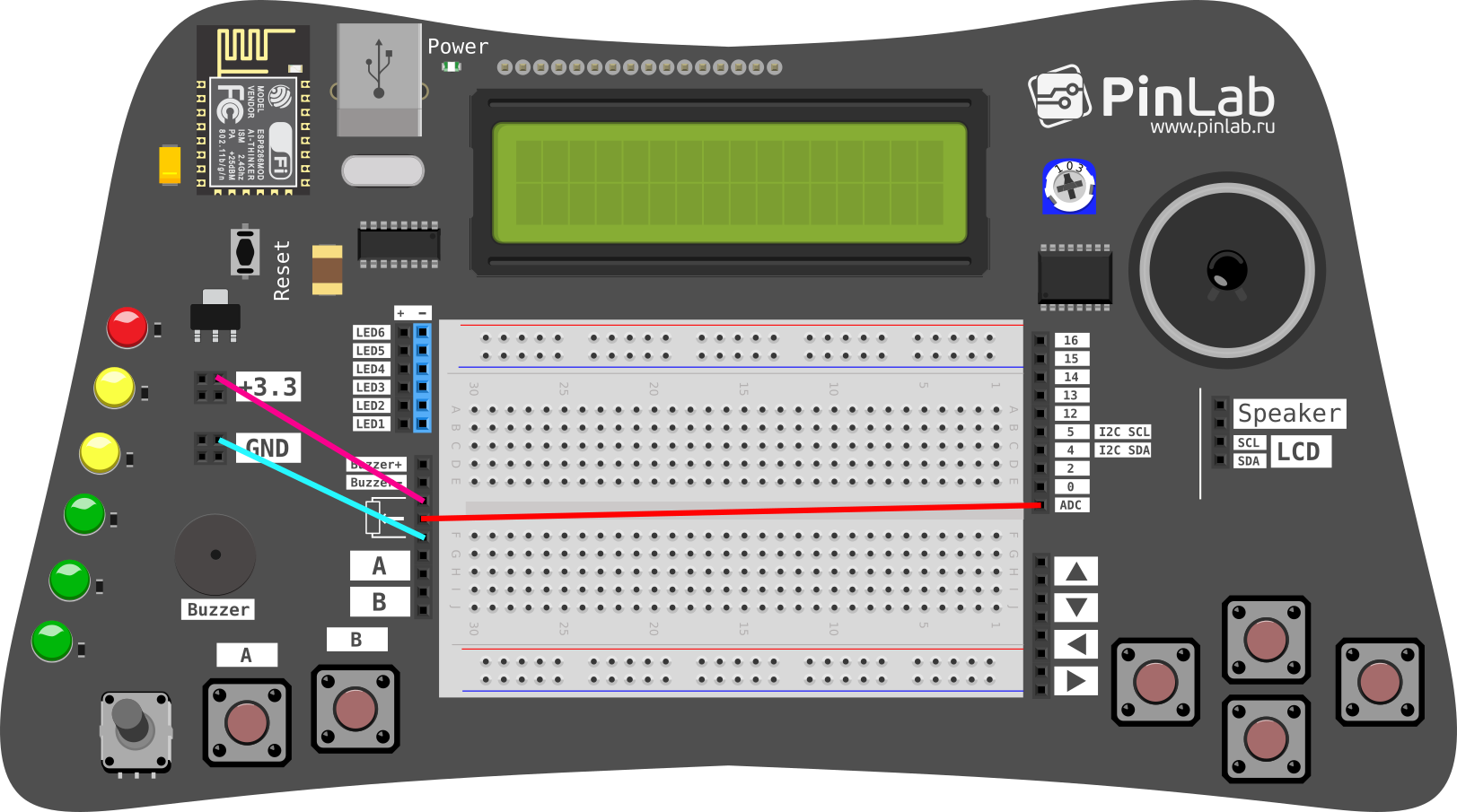 Рисунок 3. Монтажная схема эксперимента
Рисунок 3. Монтажная схема эксперимента
Программный код эксперимента
- Exp14.ino
- #define ACD_PIN A0
- int value = 0;
- void setup() {
- }
- void loop() {
- }
В строке 1 мы задаем псевдоним ACD_PIN для номера канала АЦП. В нашем микроконтроллере только один канал и он имеет номер A0.
В строке 3 мы объявляем переменную value с новым для нас типом int и присваиваем ей значение 0. Переменные типа int могут хранить только целые числа в диапазоне
от -32 768 до 32 767.
В строке 6 мы с помощью функции begin() включаем последовательный порт Serial микроконтроллера для отправки сообщений на компьютер. В качестве параметра функция begin() принимает число бод (число символов в секунду), определяющее скорость передачи сообщений.
В цикле просим АЦП оцифровать текущее напряжение на его входе cпомощью функции analogRead() и записать полученное значение в переменную value. Результатом является число в диапазоне от 0 до 1023.
После чего с помощью функции println() «печатаем» значение в последовательный порт Serial.
Чтобы увидеть «напечатанные» значения включите монитор порта, нажав соответствующую кнопку в правом верхнем углу Arduino IDE. Подробнее про монитор порта.
Задержка в строке 13 нужна для того, чтобы сообщения микроконтроллера не «печатались» слишком быстро.
Попробуй изменить значение задержки и посмотреть как изменится скорость вывода сообщений в монитор порта.
В принципе наша программа может обойтись без переменной value, т.к. она только хранит считаное значение с АЦП, при этом изменения значения не происходит. Мы можем удалить строку 3 с объявлением переменной value, а в бесконечном цикле сразу передавать полученное значение функции analogRead() в качестве аргумента в функцию печати Serial.println(). В итоге тело бесконечной функции loop() будет выглядеть следующим образом.
Serial.println(analogRead(ACD_PIN)); delay(200)
Дополнительное задание
- Если наш АЦП при напряжении 0 вольт возвращает результат 0, а при 3.3 вольт — 1023, то какой результат преобразования будет при напряжении 1.65? А если напряжение 1 вольт ровно?
- Какое напряжение соответствует значению 785?